17.08.2025 von Viktor Siebert
Wenn der Encoder für sporadische Ausfälle sorgt, Erfahrungen mit dem SGMSH-20DCA6F-OY
In vielen Produktionsumgebungen ist der Yaskawa SGMSH-20DCA6F-OY ein zuverlässiger Motor, der tagtäglich seinen Dienst verrichtet. Dennoch zeigt sich in unserer Reparaturpraxis immer wieder eine Schwachstelle: der Encoder.
Ein typisches Fehlerbild beginnt damit, dass der Antrieb, häufig ein SGDH-20DE – die Meldung A.81 (Absolute Encoder Backup Error) anzeigt. Der Fehler tritt selten von jetzt auf gleich auf, sondern schleicht sich ein. Mal stürzt die Maschine ohne erkennbaren Grund ab, mal erscheint sporadisch die Fehlermeldung am Antrieb.
Ein Neustart scheint zunächst zu helfen, doch nur vorübergehend. Dann tritt der Fehler wieder auf. Diese wechselhafte Symptomatik macht die Fehlersuche besonders schwierig. Schnell steht die Frage im Raum: Liegt der Fehler am Antrieb, am Motor oder an den Leitungen? Viele Kunden berichten von langen, nervenaufreibenden Suchphasen und nicht selten von echter Verzweiflung.
Da die Fehlermeldung am Antrieb erscheint, wird dieser oft zuerst verdächtigt. In manchen Fällen wird der Antrieb getauscht – und tatsächlich folgt oft eine Phase der Ruhe. Doch nach einiger Zeit taucht der Fehler erneut auf. Faktoren wie Temperaturschwankungen, Luftfeuchtigkeit oder Vibrationen können den Fehler beeinflussen und das Auftreten begünstigen.
Zeigt ein Encoder erste Schwächen, wirken sich solche Einflüsse besonders aus – der Ausfall tritt dann scheinbar zufällig auf.
Maßnahmen bei der Reparatur
Wenn ein Motor mit diesem Fehler bei uns eintrifft, läuft die Instandsetzung nach einem klaren, strukturierten Ablauf:
- Komplette Demontage und Sichtprüfung aller Komponenten
- Präventiver Austausch auch unauffälliger Teile:
- Kugellager (für ruhigen Lauf und Reduzierung von Vibrationseinflüssen auf den Encoder)
- Steckverbinder (zur Vermeidung von Kontaktproblemen und Signalunterbrechungen)
- Dichtungen (Schutz vor Feuchtigkeit und Staub)
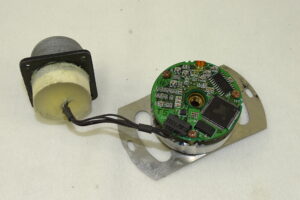
- Erneuerung des Encoders: Der UTSIH-B17CK wird durch ein neues, programmiertes und präzise justiertes Modell ersetzt
- Gründliche Reinigung mit spezieller Reinigungsemulsion zur Entfernung von Öl, Staub und leitfähigen Rückständen
- Kontrollierte Trocknung im speziellen Ofen, um Restfeuchtigkeit zuverlässig zu entfernen
Prüfablauf nach der Reparatur
Nach der Montage wird der Motor auf einem dafür eingerichteten Prüfstand getestet. Der Test erfolgt nach detaillierter Checkliste:
- Funktionsprüfung unter verschiedenen Lastbedingungen
- Messung der Signalqualität des Encoders
- Analyse des thermischen Verhaltens im Dauerbetrieb
- Kontrolle von Drehzahl- und Positionsgenauigkeit
Nur wenn alle Werte innerhalb der Sollparameter liegen, wird der Motor wieder für den Einsatz freigegeben.
Vorbeugende Tipps für den Betrieb
Auch wenn sich Verschleiß nie ganz vermeiden lässt, können Betreiber einiges tun, um das Risiko encoderbedingter Stillstände zu reduzieren:
- Umgebung des Motors so trocken wie möglich halten
- Plötzliche Temperaturwechsel vermeiden, um Kondenswasser zu verhindern
- Kabel regelmäßig prüfen, besonders abgeschirmte Encoderleitungen
- Auf ungewöhnliche Vibrationen achten, die Encoder und Lager belasten können
- Regelmäßige Inspektionen einplanen, auch ohne aktuellen Fehler, um beginnende Schäden frühzeitig zu erkennen
Wer diese Punkte beachtet, kann die Lebensdauer von Motor und Antrieb deutlich verlängern und vor allem die frustrierende Suche nach sporadischen Fehlern vermeiden.
(Wissenswertes)
Warum geht der Encoder kaputt?
Der Encoder ist das „Auge“ des Motors – er liefert die Rückmeldesignale für Position, Geschwindigkeit und Drehmoment. Ohne ihn weiß der Antrieb nicht, wo sich die Welle gerade befindet. Doch genau dieses empfindliche Bauteil ist im harten Industriealltag besonderen Belastungen ausgesetzt.
- Temperaturwechsel: Wenn der Motor in einer Umgebung mit starken Schwankungen läuft, kann sich im Inneren Kondenswasser bilden. Feuchtigkeit dringt in den Encoder ein und greift die Elektronik an.
- Vibrationen: Unruhiger Lauf, ausgeschlagene Lager oder Schwingungen von der Maschine übertragen sich direkt auf den Encoder. Mit der Zeit entstehen Mikrorisse in der Elektronik oder Signalstörungen.
- Feuchtigkeit und Ölnebel: In vielen Werkzeugmaschinen herrscht ein Mix aus Kühlmittel, Öl und hoher Luftfeuchtigkeit. Gelangt dies durch undichte Dichtungen an den Encoder, oxidieren Steckkontakte oder Leiterbahnen.
- Alterung der Elektronik: Auch ohne äußere Einflüsse altern Bauteile wie optische Sensoren oder Kondensatoren im Encoder. Das Signal wird schwächer, sporadische Ausfälle treten auf.
- Kabel- und Steckverbindungen: Häufig ist es nicht nur der Encoder selbst, sondern die Verbindung. Korrosion, lose Kontakte oder Kabelbrüche verursachen Signalverluste, die als Encoderfehler erscheinen.
Der Weg zum Ausfall ist meist schleichend:
Zuerst treten kurze Signalstörungen auf, die Maschine „verschluckt“ sich oder stürzt sporadisch ab. Dann zeigt der Antrieb Fehler A.81, verschwindet aber nach einem Neustart wieder. Schließlich wird der Fehler häufiger, bis der Encoder endgültig keine verwertbaren Signale mehr liefert.






Weitere Informationen wie Preis, Lieferzeit zu erwähnten Geräten:
Weitere Informationen zu unseren Yaskawa-Reparaturen finden Sie hier.
📞 Kontaktieren Sie uns gerne, wenn Sie Fragen zu Ihrer Yaskawa-Antriebstechnik haben. Unser erfahrenes Team steht Ihnen jederzeit mit Rat und Tat zur Seite
Gerätedaten (Technische Daten)
| Parameter | Wert |
|---|
| Modell | SGMSH-20DCA6F-OY |
| Serie | Yaskawa Sigma II |
| Nennleistung | 2000 W |
| Nennmoment | 6,36 Nm |
| Nenndrehzahl | 3000 min⁻¹ |
| Nennstrom | 6,2 A |
| Nennspannung | 400 V AC |
| Isolationsklasse | F |
| Wellenausführung | Geradewelle mit Passfeder & Gewinde (Code 6) |
| Encoder | 17-Bit Absolut-/Inkremental-Encoder (Code C) |
| Schutzart | IP67 (mit Öldichtung) je nach Ausführung |
| Herstellungsdatum | 06/2015 |
| Herkunft | Japan |
Einsatzumgebung & kompatible Geräte
Der SGMSH-20DCA6F-OY arbeitet in CNC-Maschinen, Industrierobotern, Werkzeugmaschinen und Automatisierungslinien.
Er ist für den Betrieb mit Yaskawa Sigma II Servoverstärkern (z. B. SGDH-Serie) ausgelegt und wird in Achsantrieben mit hoher Präzision und Drehmomentdichte eingesetzt.
Empfohlene Umgebung:
- Umgebungstemperatur: 0 – 40 °C
- Luftfeuchtigkeit: 20 – 80 % (nicht kondensierend)
- Schutz vor direkter Sonneneinstrahlung, Ölnebel und leitfähigem Staub
Funktionsbeschreibung
Der SGMSH-20DCA6F-OY ist ein kompakter, hochdrehender AC-Servomotor mit 17-Bit-Encoder, der eine präzise Positions-, Geschwindigkeits- und Drehmomentregelung ermöglicht.
Er bietet:
- Hohe Drehmomentdichte bei geringer Baugröße
- Schnelle Beschleunigungs- und Bremsvorgänge
- Rückführung exakter Positionsdaten an den Servoverstärker
- Kompatibilität mit Absolut- und Inkremental-Betrieb
- Robuste Bauweise für raue Industrieumgebungen
Alarmmeldungen & Troubleshooting
| Alarmcode | Alarmname | Beschreibung | Lösung |
|---|
| A.02 | Parameter Breakdown | EEPROM-Daten fehlerhaft | Parameter prüfen, ggf. neu initialisieren |
| A.03 | Main Circuit Encoder Error | Fehler im Leistungskreis | Verdrahtung prüfen, Verstärker tauschen |
| A.05 | Servomotor/Amplifier Combination Error | Leistungsklassen passen nicht | Kompatibles Motor-/Verstärkerpaar verwenden |
| A.10 | Overcurrent / Heat Sink Overheated | Überstrom oder Kühlkörper überhitzt | Last reduzieren, Kühlung prüfen |
| A.30 | Regeneration Error Detected | Fehler im Regenerationskreis | Widerstand/Kreis prüfen |
| A.32 | Regenerative Overload | Energie > Widerstandskapazität | Bremswiderstand anpassen |
| A.40 | Overvoltage | DC-Spannung zu hoch | Netzspannung prüfen |
| A.41 | Undervoltage | DC-Spannung zu niedrig | Spannungsversorgung prüfen |
| A.51 | Overspeed | Drehzahl zu hoch | Parameter prüfen |
| A.71 | Overload: High Load | Dauerhafte Überlast | Last reduzieren, Motorgröße anpassen |
| A.81 | Absolute Encoder Backup Error | Versorgung Encoder ausgefallen | Batterie / Versorgung prüfen |
| A.C9 | Encoder Communication Error | Keine Kommunikation | Kabel, Stecker, Encoder prüfen |
Bestandteile
| Baugruppe | Beschreibung |
|---|
| Stator | Wicklungen für Drehmomenterzeugung |
| Rotor | Permanentmagnetrotor |
| Encoder UTSIH-B17CK | 17-Bit Absolut-/Inkrementalgeber für Positionsrückmeldung |
| Wellenlagerung | Hochpräzise Kugellager |
| Gehäuse | Aluminiumdruckguss, schwarz beschichtet |
| Wellenende | Geradewelle mit Passfeder und Gewinde |
| Anschlussklemmen | Leistungs- und Signalleitungen getrennt geführt |
| Lüftungssystem | Passivkühlung durch Gehäuseoberfläche |
| Wellendichtung | Schutz vor Öl und Staub (IP67-Option) |