18.09.2025 von Viktor Siebert
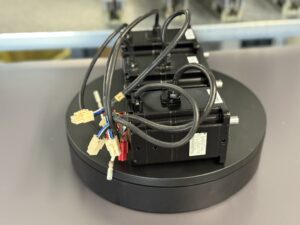
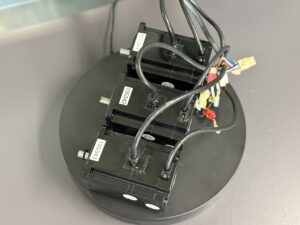
Instandhaltung statt Retrofit + drei Yaskawa SGMPH-04A1A-YR52 AC-Servomotoren erfolgreich überholt!
Wir bekamen drei dieser Motoren aus einer speziellen Yaskawa-Anwendung.
Der Kunde hatte die defekten Motoren zunächst gesammelt und gewöhnlich beim Hersteller im Austausch getauscht. Doch bei der letzten Anfrage wurde ihm mitgeteilt, dass die Motoren abgekündigt seien und nur ein Retrofit infrage käme, also Austausch von Motoren, Servopacks und Steuerung. Das bedeutete für den Kunden extreme Kosten, praktisch vergleichbar mit dem Ersatz der ganzen Maschine ein Szenario, das in seinen Plänen unmöglich war.
Durch eine Empfehlung kam er zu uns.
Die Analyse zeigte:
- Die Bremsen waren glücklicherweise noch im Toleranzbereich.
- Die Encoder hingegen zeigten Fehler und lieferten unzuverlässige Rückmeldesignale.
Wir führten eine vollständige Überholung durch:
- Austausch aller Lager
- Wechsel der Dichtungen und Stecker
- Reinigung in mehreren Schritten inkl. Emulsionsentfernung
- Ofentrocknung zur Restfeuchte-Entfernung
- Encoder-Ersatz (UTSAH-B16DC-E) mit exakter Justierung
- Signaltests und Isolationsmessung
Auf dem Testplatz wurden alle Motoren unter realen Lastbedingungen geprüft:
- Signalgüte Encoder
- Drehmoment- und Drehzahltests
- Bremshaltekraft
- Isolationswiderstand
Nach Abschluss der Arbeiten konnte der Kunde seine Maschinen ohne Retrofit wieder in Betrieb nehmen, ein erheblicher wirtschaftlicher Vorteil.
Ursachen für Encoder- oder Motorausfälle
- Alterung und Ausfall der Encoder-Elektronik
- Verschmutzung durch Öl, Staub oder Emulsionen
- Lagerschäden durch Dauerbelastung
- Kabel- und Steckerverschleiß
- Überhitzung bei unzureichender Kühlung
Präventive Tipps für Kunden
- Regelmäßige Sichtkontrolle von Kabeln und Steckern
- Überprüfung der Encoder-Signale im Wartungsintervall
- Vorbeugender Lagerwechsel nach ca. 20.000–30.000 Betriebsstunden
- Reinigung der Maschinenumgebung zur Reduktion von Öl- und Staubbelastung
- Funktionsprüfung der Bremse, besonders bei vertikalen Achsen




Weitere Informationen wie Preis, Lieferzeit zu erwähnten Geräten:
Yaskawa SGMPH-04A1A-YR52 Servo Motor
Weitere Informationen zu unseren Yaskawa-Reparaturen finden Sie hier.
📞 Kontaktieren Sie uns gerne, wenn Sie Fragen zu Ihrer Yaskawa-Antriebstechnik haben. Unser erfahrenes Team steht Ihnen jederzeit mit Rat und Tat zur Seite.
Gerätedaten (technische Hauptdaten)
| Parameter | Wert |
|---|
| Modell | Yaskawa SGMPH-04A1A-YR52 AC Servo Motor |
| Spannung | 200 V AC |
| Nennstrom | 2,6 A |
| Nennleistung | ca. 400 W |
| Nenndrehmoment | ca. 1,27 Nm |
| Max. Drehzahl | 3000 U/min |
| Gewicht | ca. 4,5–5,0 kg (geschätzt, baugleiche Modelle) |
| Schutzklasse | IP65 (Standard für Sigma-II Motoren) |
| Isolationsklasse | B |
| Encoder | Yaskawa UTSAH-B16DC-E (absolut, hochauflösend) |
| Bremse | OGURA CLUTCH MCDB20Y-15 |
| Kühlung | Natürliche Konvektion (keine externe Kühlung) |
| Baugröße | Mittelbaugröße, kompakt |
| Hersteller | Yaskawa Electric Corporation, Japan |
Einsatzumgebung & kompatible Geräte
Der Motor wird in CNC-Maschinen, Werkzeugmaschinen, Bestückungsautomaten und Automatisierungsanlagen eingesetzt.
Er ist kompatibel mit Yaskawa Sigma II Servopacks (SGDH-Serie) im Leistungsbereich 400 W.
Typische Anwendungen: Vorschubantriebe, Positionierantriebe, Achsantriebe in Maschinen mit präziser Bewegungsführung.
Funktionsbeschreibung
Der SGMPH-04A1A-YR52 ist ein kompakter AC-Servomotor mit hoher Dynamik und präziser Drehmomentsteuerung.
Durch den UTSAH-B16DC-E Encoder bietet er präzise Positionsrückmeldung für hochgenaue CNC- und Automatisierungsanwendungen.
Die integrierte Haltebremse OGURA MCDB20Y-15 ermöglicht sichere Positionierung bei stromlosem Zustand, besonders wichtig für vertikale Achsen.
Alarmmeldungen & Troubleshooting
Basierend auf Yaskawa Sigma II/SGDH Manuals
| Code | Fehlerbeschreibung | Ursache | Lösung |
|---|
| A.02 | Parameter Breakdown | EEPROM-Daten fehlerhaft | EEPROM prüfen, ggf. Servopack tauschen |
| A.03 | Main Circuit Encoder Error | Fehlerhafte Daten im Leistungskreis | Encoder- oder Kabelprüfung |
| A.05 | Servo/Motor-Kombinationsfehler | Falsche Motor-Drive-Kombination | Richtige Parametrierung, Kompatibilität prüfen |
| A.10 | Überstrom / Überhitzung | Kurzschluss, IGBT defekt oder Überlast | Kühlung prüfen, Bauteile ersetzen |
| A.30 | Regenerationsfehler | Regenerationsschaltung defekt | Widerstand prüfen, Austausch |
| A.40 | Überspannung | DC-Spannung zu hoch | Netzspannung prüfen |
| A.41 | Unterspannung | Netzspannung zu niedrig | Spannungsversorgung kontrollieren |
| A.51 | Überspeed | Motordrehzahl zu hoch | Parameter, Encoder, Last prüfen |
| A.71 | Überlast (kurzzeitig) | Übermäßige Last | Mechanische Last prüfen, Motor überholen |
| A.82 | Encoder Checksum Error | Prüfsumme des Encoders fehlerhaft | Encoder tauschen |
| A.C9 | Encoder-Kommunikationsfehler | Keine Verbindung Motor ↔ Drive | Kabel/Encoder tauschen |
Bestandteile
| Komponente | Beschreibung |
|---|
| Rotor | Lamellenpaket mit Permanentmagneten |
| Stator | Wicklungen, dreiphasig |
| Encoder | UTSAH-B16DC-E Absolutwertgeber |
| Bremse | MCDB20Y-15 Haltebremse |
| Lager | Präzisions-Kugellager, vorn/hinten |
| Gehäuse | Aluminium, schwarz lackiert |
| Dichtungen | Wellendichtringe, Schutz IP65 |
| Stecker | Leistung/Encoderanschluss |
| Kühlung | Konvektion |